Page last modified: Apr 11 2022.
Contents
Overview
A bathymetry integration plugin that automatically spawns and removes bathymetry DEM grids converted preliminarily from high-resolution NOAA bathymetry data.
- Features
- Automatic spawn/remove with vehicle locations
- Overlaps for mission continuity
- Relocate the vehicle to the designated initial latitude and longitude at the start
- Use bathymetry tile dissected with depth-dependent texture
- GPS Viewer to see vehicle’s whereabouts
The plugin is defined at .world file and would require input settings used for preliminarily converted bathymetry data (prefix, spacings, number of columns/rows, anchored latitude/longitude). The bathymetry tile data is located at dave/models/dave_bathymetry_models/.Also, each robot will provide its locations with intervals defined at urdf. The plugin is also usable for multiple robots.
Tutorial: How-to
Quickstart
This quickstart assumes you have finished the installation of dave. The bathymetry plugin uses latitude and longitude coordinates to recognize which tiles to spawn and remove. To do so, it uses the GDAL library to convert in between UTM(epsg:4326; X/Y coordinates) coordinate system used in the simulation and WGS86(eps:3857, Latitude/Longitude) coordinates system.
# For initial lat/lon spawning sudo apt-get install python3-gdal # For GPS Viewer # Install required python3 modules pip3 install folium PyQtWebEngine pyqt5-toolsDownload files for bathymetry demo and recompile to install
downloading a file from google drive became complicated. Use the long line command below. Or, use this link
# Install wget sudo apt-get install wget # Download demo files archive wget --load-cookies /tmp/cookies.txt "https://docs.google.com/uc?export=download&confirm=$(wget --quiet --save-cookies /tmp/cookies.txt --keep-session-cookies --no-check-certificate 'https://docs.google.com/uc?export=download&id=1lOqG5cdf5NEHnxsqKyEWNgQ0Ugk6u80A' -O- | sed -rn 's/.*confirm=([0-9A-Za-z_]+).*/\1\n/p')&id=1lOqG5cdf5NEHnxsqKyEWNgQ0Ugk6u80A" -O Dave_Bathymetry_Demo.tar.gz && rm -rf /tmp/cookies.txtThen, move the file to appropriate location and extract
# Move downloaded file to dave directory mv Dave_Bathymetry_Demo.tar.gz ~/uuv_ws/src/dave cd ~/uuv_ws/src/dave # Extract the demo files tar -xzvf Dave_Bathymetry_Demo.tar.gz # recompile cd ~/uuv_ws catkin buildRun gazebo with roslaunch command for bathy_dave launch file:
roslaunch dave_demo_launch dave_bathymetry_demo.launch- Unpause the gazebo by clicking the play button at the bottom-left of the window
- As the clock ticks in the ROS Server,
set_init_latlonwill reposition the vehicle to the initial position defined at the launch file - Zoom out (scroll down) to see the edge of the loaded bathymetry grid tile and the Rexrov
Run this command on a new terminal window Assume that you are in the dave directory
python3 ~/uuv_ws/src/dave/gazebo/dave_gazebo_bathymetry_misc/merry_go_round.pyThe
merry_go_round.pyscript will move the vehicle in a circle. You may change the script parameter inside to modify center lat/lon, radius, depth, angular speed.
Bathymetry Plugin settings
The details of the plugin settings are described at the end of the dave_bathymetry_demo.world file
<plugin name="bathy_dave_plugin" filename="libdave_bathymetry_world_plugin.so">
<bathymetry interval_s="0.1">
<grid prefix="MontereyBay" tiles_to_keep="1" priority="1" colmax="10" rowmax="10"
anchor_lon="-70.699" anchor_lat="41.509" spacing_lon="0.012" spacing_lat="0.010" />
</bathymetry>
Also, the update rate for the tiles is specified in each robot description. dave/urdf/robots/rexrov_description/urdf/rexrov_oberon7_bathymetry.xacro
<gazebo>
<plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
<robotNamespace>/$(arg namespace)</robotNamespace>
<robotParam>/$(arg namespace)/robot_description</robotParam>
<bathymetry>
<interval_s>0.1</interval_s>
</bathymetry>
</plugin>
</gazebo>
Initial positioning of the vehicle
At dave/examples/dave_demo_launch/launch/dave_bathymetry_demo.launch
<arg name="bathymetry_prefix" value="MontereyBay"/>
<arg name="robot_name" value="rexrov"/>
<arg name="initial_latitude" value="36.805"/>
<arg name="initial_longitude" value="-121.810"/>
<arg name="initial_depth" value="-5"/>
...
...
<!-- Set initial position using latitude and longitude (EPSG:4326) -->
<include file="$(find set_init_latlon)/launch/set_init_latlon.launch">
<arg name="namespace" value="$(arg robot_name)"/>
<arg name="init_lat" value="$(arg initial_latitude)"/>
<arg name="init_lon" value="$(arg initial_longitude)"/>
<arg name="depth" value="$(arg initial_depth)"/>
</include>
robot_name: name of the vehicle modelinitial_latitude: initial latitude [deg]initial_longitude: initial longitude [deg]initial_depth: initial depth [m]
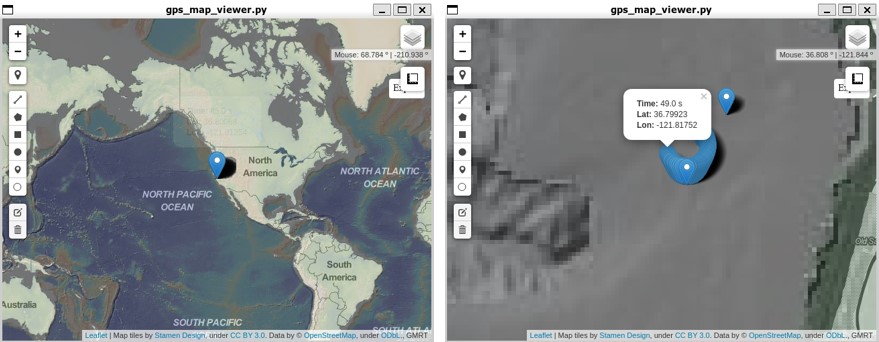
GPS Viewer
<!-- GPS Viewer -->
<include file="$(find gps_map_viewer)/launch/gps_map_viewer.launch">
<arg name="namespace" value="$(arg robot_name)"/>
<arg name="refresh_rate" value="1.0"/>
<arg name="save_html" value="True"/>
</include>
namespace: name of the vehicle modelrefresh_rate: refresh rate for GPS position marker update in the mapsave_html: Save GPS log as seen on the viewer as HTML which will be saved at/tmp/GPSViewer_log.htmlwhich you can open with a browserdefault_zoom: set initial zoom (range from 0 to 15, larger mean more zoom)
Importing more bathymetry data
- The bathymetry data need to be converted to be imported using the plugin. The converter to obtain bathymetry tiles from RAW bathymetry files can be found at Bathymetry converter.
*The plugin was developed by Micahel Jakuba at WHOI and modified and implemented to the dave project by Woensug Choi.