Page last modified: Aug 11 2021.
This page describes usage for the reference configuration of Project DAVE. The reference configuration includes:
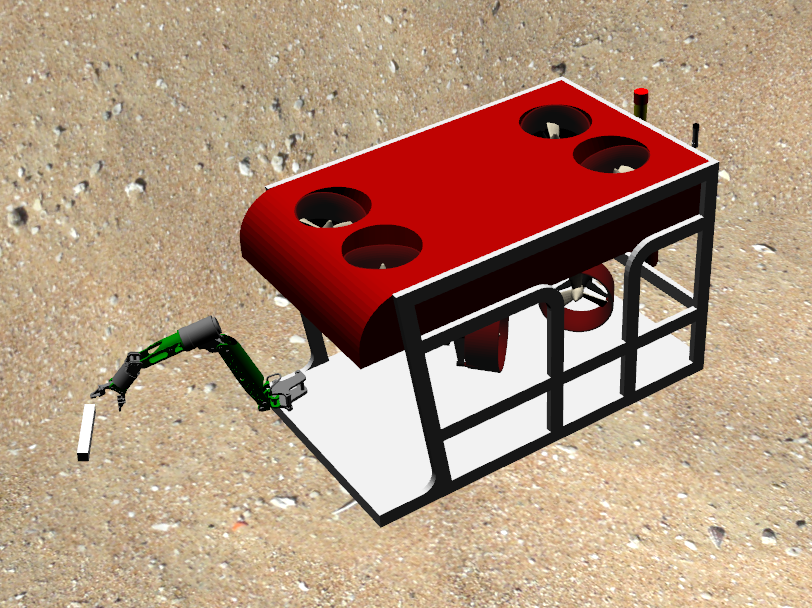
- An underwater environment, including an ocean floor.
- A UUV including thrusters, a manipulator arm, and sensors.
- A bar on the ocean floor that the UUV can grab.
Here is an example view:
Run the UUV simulation
roslaunch uuv_dave uuv_dave.launch
Control the UUV
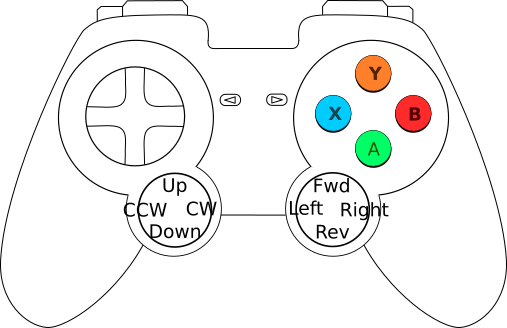
The simulation may be controlled using a joystick. Joystick operation depends on joystick mode:
| Mode | Control |
|---|---|
| Default | UUV Body |
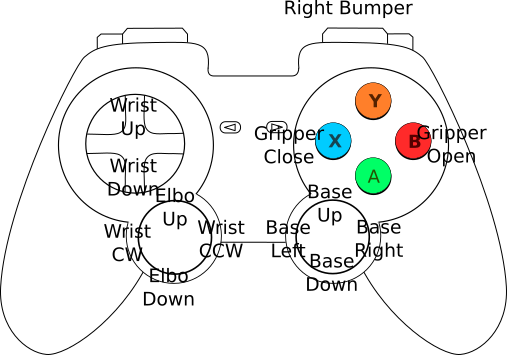
| Right Bumper pressed | Oberon 7 Arm |
UUV body controls:
Oberon 7 Arm controls:
Control the Gazebo camera
Control Gazebo’s camera scene view using the mouse, see http://gazebosim.org/hotkeys.html.